Hogyan
növelhető a valós idejű GPS-mérés pontossága?
 Manapság már szinte mindenki ismeri a GPS
technológiát, amely a valaha fejlesztett legpontosabb rádió alapú
helymeghatározó rendszer. Fontos azonban tudni, hogy míg az általánosan
elterjedt közúti navigációs alkalmazások esetén néhány méteres helymeghatározási
pontosság elegendő, a területalapú támogatásoknál a 2009-es
AKG rendelet szerint már legalább 3
m-es pontossággal kell megadni a terület töréspontjainak
pozícióját.
Manapság már szinte mindenki ismeri a GPS
technológiát, amely a valaha fejlesztett legpontosabb rádió alapú
helymeghatározó rendszer. Fontos azonban tudni, hogy míg az általánosan
elterjedt közúti navigációs alkalmazások esetén néhány méteres helymeghatározási
pontosság elegendő, a területalapú támogatásoknál a 2009-es
AKG rendelet szerint már legalább 3
m-es pontossággal kell megadni a terület töréspontjainak
pozícióját.
Annak érdekében, hogy minden érintett meg tudjon
felelni a szigorúbb követelményeknek, összefoglaljuk azokat a technikai
eszközöket és lehetőségeket, amelyek segítségével növelhető a GPS-mérés
pontossága.
Elméleti alapok
Mielőtt a pontosság kérdésére rátérünk, tekintsük át röviden, hogyan működik a
GPS, milyen módon valósul meg a pozíció meghatározása. A GPS egy összetett
technológia, de működésének alapelvei igen egyszerűek. Ezeknek az ötleteknek a
gyakorlatba való átültetéséhez, valamint a rendszer rendkívül pontos működéséhez
napjaink legmodernebb technikájára van szükség.
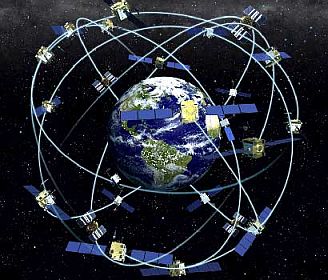
A Global Positioning System (GPS) egy
egész világon elterjedt rádió-navigációs-rendszer, amely 24 műhold
konstellációjából, 5 földi ún. monitor állomásból és a GPS vevőberendezésből
áll, amelyből számtalan lehet, a Föld bármely pontján. A műholdak keringési
ideje 12 óra (6 pályasíkon egymáshoz képest 60 fokkal elforgatva, az
egyenlítőhöz viszonyított pályaelhajlás 55 fok).
A műholdas
helymeghatározás gyakorlatilag egy "egyszerű" időmérésből kiszámított
távolságmérésen alapul. Mivel ismerjük a rádióhullámok terjedési sebességét, ha
van két nagyon pontos óránk, és ismerjük a rádióhullám kibocsátásának és
beérkezésének idejét, ezek alapján meghatározhatjuk a forrás távolságát. A
gyakorlatban tehát a műholdak által sugárzott rádiójelek alapján a GPS vevő a
Földön meghatározza a műholdak helyzetét a pályájukon, a rádiójel terjedési
sebessége és a műhold-GPS vevő között mért jelterjedési idő (futásidő) alapján a
műholdak távolsága számítható az általános iskolából ismert s
(távolság) = v (jelterjedési sebesség) x t
(futásidő) képlettel.
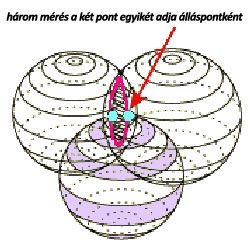
Három darab műhold-vevő távolság meghatározása után
a földi helyzetünket a műholdak köré rajzolt képzeletbeli gömbök
metszéspontjának kiszámításával lehet meghatározni. Egy műhold
esetén a műhold köré rajzolt gömb felületén van a
pozíciónk. Két műhold esetén -a műholdak kötött pályája miatt-
a két gömb egy körív mentén metsződik, ebben az esetben tehát már ezen a
köríven vagyunk. Egy harmadik műholdra végzett
távolságmérésnél a harmadik gömb két pontban metszi a
köríven metsződő két gömböt. Három műholdból tehát az űrben csak két pontra
tudjuk szűkíteni a pozíciónkat. A tényleges pozíciónk eldöntéséhez végezhetnénk
egy negyedik mérést, de általában a két pont közül az egyik nevetséges helyen
van (a Földhöz képest az űrben vagy a Föld belsejében), így ezt a
„hamis pozíciót” mérés nélkül is el lehet vetni. Mivel azonban a futásidőt
nagyon pontosan kell mérni, az idő szinkronizálásához szükséges a negyedik
műhold rádiójeleinek vétele is, a GPS pozíció meghatározásához tehát
legalább négy műhold egyidejű észlelése szükséges.
A GPS-es helymeghatározás pontossága
alapvetően öt tényezőtől függ
- méréshez használt műholdak számától (szabad kilátás az égboltra)
- a műholdak pálya- és időadatainak hibájától
- a távolság-meghatározás hibájától (rádiójelek ionoszférán áthaladva,
ill. tereptárgyakról visszaverődve érkeznek a vevőbe)
- a műholdak geometriai elhelyezkedésétől
- a GPS-vevő készülék és az alkalmazott korrekciós megoldások műszaki
jellemzőitől.
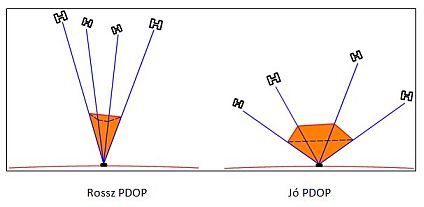
Ha a műholdak túl közel vannak egymáshoz az égbolton,
akkor a mérés bizonytalansága nagyobb, ezért jobb, ha a nagyobb térben láthatók
a műholdak. E geometriai hatás figyelembe vételére a GPS- szel foglalkozó
szakterület a PDOP (Position Dilution of Precision) nevű mennyiséget
használja. Minél nagyobb a PDOP értéke annál nagyobb a műholdak geometriai
elhelyezkedéséből várható hiba mértéke. A pályaadatok és a távolságmérés
pontossága különböző észlelési és feldolgozási módszerekkel fokozható, de a
kedvezőtlen műhold-geometria nem javítható, de a feldolgozásra kerülő mérések
közül a magas PDOP értékkel rendelkezők (rossz műhold-geometria)
kizárhatók.
A mérési pontosság növelésének
módszerei
Mivel a fenti tényezők közül az első négy szinte
egyáltalán nem befolyásolható, a vevőkészülék körültekintő kiválasztásával és
kiegészítő szoftveres technológiák alkalmazásával érhetünk el megfelelő mérési
eredményt kedvezőtlen körülmények között is. Tekintsük át sorban ezeket a
lehetőségeket.
1. Professzionális geodéziai GPS vevők
alkalmazása
A geodéziai GPS vevőkkel végzett méréseknél
időigényes utófeldolgozással, két rádiójel frekvencián történő méréssel, ill.
vevőpárral ún. RTK (real-time kinematikus) DGPS méréssel lehet a centiméteres
pontosságot elérni. A DGPS technológia a helymeghatározási pontosságot azáltal
növeli, hogy a felhasználó vevője által számított pozíciót egy ismert helyzetű
referencia-vevőkészülék helyzetéhez viszonyítva kalkulálja. A mérési hiba egy
külön csatornán keresztül folytatott kommunikáció során kiküszöbölhető. Ezek a
megoldások képezik a GPS technológia csúcsát, ám az eszközök beszerzése komoly
beruházást igényel (2 millió Ft-tól 5 millió Ft-ig), és magas a korrekciós
jelszolgáltatás díja is. Ráadásul a professzionális eszközök használatához
speciális GPS méréstechnológia-, és számítástechnikai ismeretekre van
szükség.
2. Térinformatikai GPS vevők alkalmazása korrekciós
jellel
Kézi GPS vevők használatakor a legalább 1 m-es pontosság
eléréséhez a megoldást az RTK vevőknél is használt differenciális
helymeghatározási módszer (DGPS) adja. A DGPS módszer hátránya, hogy két GPS
vevő szükséges hozzá, ezért több országban építettek ki kiegészítő rendszereket,
hogy a korrekciós jel egy második vevő használata nélkül is eljuttatható legyen
a felhasználó vevőjére. Ezek lehetnek műhold alapúak (SBAS)
vagy pedig földi telepítésű (GBAS) kiegészítő
rendszerek.
A.) Műhold alapú korrekciós jelek
fogadása
Ezeknél a kiegészítő rendszereknél a korrekciós
jeleket műholdak sugározzák. Hazánkban az európai területre sugárzó, egyenlítői
pályán mozgó EGNOS rendszer használható
ingyenesen a jelek fogadására és feldolgozására alkalmas vevővel. Az EGNOS korrekcióval
vevőtől és mérési körülményektől függően akár 1 m alatti pozíció-meghatározási
pontosság is elérhető. A használhatósága azonban geomorfológiai helyzethez
kötött, mivel a vevőnek szabadon ki kell látnia déli irányban a kb. 30°-os szög
alatt látszódó EGNOS műholdra.
Az ugyancsak műhold alapú Omnistar
korrekciós szolgáltatással (VBS korrekció) szintén biztosítható a szub-méteres
valósidejű pontosság. Erre azonban elő kell fizetni (egy évre kb. nettó 390 ezer
forint), és megfelelő vevőkészülék is szükséges hozzá.
B.)
Földi telepítésű kiegészítő rendszer használata
A Földmérési és
Távérzékelési Intézet (FÖMI) 2000-től fejleszti a hazai országos földi
telepítésű kiegészítő rendszert. A valós idejű méréshez szükséges
korrekciós jelek interneten keresztül az ún. NTRIP technológiával jutnak el a
vevőkre. A szolgáltatás igénybevételéhez a szolgáltatás előfizetésére és egy
alkalmas készülékre van szükség. A korrekció az internetről egy GPRS képes
mobiltelefonon keresztül (legtöbbször Bluetooth kapcsolaton) jut el a GPS
vevőre. A szolgáltatás költsége mindössze 3 Ft + ÁFA/perc. Az NTRIP korrekciós
technológia - szemben a műhold alapú korrekcióval- akkor is használható, ha a
földrajzi helyzetünk miatt nincs lehetőség műhold alapú korrekció vételére.
Hogyan
válasszunk megfelelő GPS-vevő készüléket?
A fentiek alapján
egyértelmű, hogy az olcsó, navigációs célokra fejlesztett, SIRF III-as
chipkészlettel szerelt GPS vevők (pl. GPS Mapper, vagy a pár tízezer
forintba kerülő egyszerű PDA-k) nem alkalmasak 3-5 m-nél pontosabb
pozíciómeghatározásra. Ha meg kell felelni az új AKG által támasztott
követelményeknek, akkor a térinformatikai adatgyűjtésre tervezett vevők közül
kell választani. Az alábbiakban néhány lehetőség bemutatásával
szeretnénk megkönnyíteni a döntést.
1. Magellan MobileMapper
CX: az MVH által a területalapú támogatások ellenőrzésére
rendszeresített Magellan MobileMapper CE készülék utóda, amely már nettó 620
ezer Ft-tól elérhető.
 A kategória
egyik legalacsonyabb
árú eszköze.
A kategória
egyik legalacsonyabb
árú eszköze.
A készülék az esetek 95%-ában alkalmas 1 méter alatti
pozíció meghatározásra ingyenes EGNOS korrekcióval, amennyiben az alábbi
feltételek teljesülnek:
- szabad kilátás az égboltra (az elevációs maszk kisebb mint 10 fok)
- minimum 6 GPS műhold folyamatos követése
- maximum 3-as PDOP érték
- a mérés megkezdése előtt minimum 10 másodpercnyi tartózkodás a mérési
ponton
- minimum 30 másodpercnyi átlagolt mérés
- a készülék fejmagasságban tartása 45 fokos szögben vagy külső GPS antenna
használata.
Ha ezen felül szükség van, előfizetéses NTRIP korrekcióra,
a MobileMapper CX ezt a technológiát is támogatja.
2. Topcon GMS-2: a szokásos GPS műholdakon
felül a GLONASS műholdak vételére is alkalmas térinformatikai vevő, amely
átlagon felüli pontosságot biztosít az erdőkkel borított és hegyvidéki területeken.
NTRIP vagy Omnistar korrekcióval alkalmas a szubméteres valósidejű pozíció
meghatározásra.
Közepes árú készülék, nettó 900 ezer forinttól megvásárolható.
 Alkalmassá
tehető az orosz műholdrendszer használatára is, beépített kamerát tartalmaz.
Alkalmassá
tehető az orosz műholdrendszer használatára is, beépített kamerát tartalmaz.
3. Trimble eszközök: a GeoExplorer 2008
termékcsaládból a GeoXT, illetve a GeoXH (nettó 1,2 -1,6 M Ft),
a Pathfinder
sorozatból a ProXT, ProXH, ProXRT vevők (nettó 700 ezer - 2,4 M Ft) alkalmasak a
valós idejű szubméteres ( 1 méternél pontosabb) pozíció meghatározásra.
Az eszközök árai
tájékoztató jellegűek, kiegészítők és feldolgozó szoftver nélkül
értendők.
A megfelelő szoftver: DigiTerra
Explorer
Természetesen valamennyi fenti eszközhöz szükség van a
magyar gazdálkodók igényeihez igazodó DigiTerra Explorer szoftver használatára,
amely az MVH-nál már bizonyított a területalapú támogatások ellenőrzése során.
A DigiTerra
Explorer segítségével az új AKG rendeletnek megfelelő
mérési
jegyzőkönyv és területszámítási vázrajz a digitális állományokból
azonnal nyomtatható, ráadásul a háttérben közvetlenül használhatjuk a MePAR
térképet. Kényelmesen, magyar nyelvű kezelőfelületen keresztül kapjuk meg a
területmérések eredményét
EOV vetületi rendszerben.
